文章已刊载在《模具制造》杂志2019年8月刊,如需“订阅”请留言
作者: 吕英杰,陈红杰,张威
青岛职业技术学院(山东青岛 266555)
第一作者简介:吕英杰,男,1975年生,硕士,高级工程师,先后从事模具设计与制造、模具数控编程、模具质量管理等工作;主要研究方向:模具设计与制造、三维扫描逆向工程、CAD/CAM数控编程技术、3D打印技术。
【摘要】以家电冰箱的果菜盒模具为例,分析模具客户的需求及逆向工程技术的概念。借助于三位扫描仪、三维扫描软件、Geomagic DesignX逆向工程软件,UG正向设计软件,详细地阐述了逆向工程技术在模具设计与制造中的应用步骤和方法。该研究为注塑模具厂因产品升级换代进行模具修模提供了宝贵的经验,值得注塑模具厂在产品升级改造中进行推广和应用。
关键词:三位扫描;逆向工程;模具设计与制造;模具修模
引言
对于注塑模具厂来说,经常会出现模具修模的情况,一般来说有以下几种原因:客户产品更改造成的模具修模、模具自身设计方案不合理造成的模具修模、模具制造过程中发生的质量问题。其中因客户产品更改造成的模具修模约总修模任务的三分之二。特别是家电产品上市几年后,随着消费者需求的变化,需要对产品进行升级改造。但是注塑模具厂接到模具修模任务后,经常会出现模具无三维图或者三维图不一致的情况,这种现象不但加大了模具修模的困难,而且还会增加模具加工过程中撞机的风险,因此需要对模具三维图重新建模。
该研究以常见的冰箱果菜盒模具为例,采用三维扫描技术、逆向工程技术、UG设计与数控编程技术对模具凹模进行三维图形的重建和加工。
1、逆向工程技术
随着人们生活水平的提高,大家对家电产品的升级换代要求也越来越高,产品的功能向多样性发展,很多客户希望购买的家电产品实现自己的个性定制服务,这就需要模具在制造过程中交期要短、质量要好、换型要快。传统的模具设计制造技术无法满足客户的需求,需要先进的模具制造技术来支撑,三维扫描逆向工程技术的出现解决了这一难题。
逆向工程技术又被称为反向工程技术、反求工程技术,它是在已有的工程产品实物基础上,运用三维扫描技术来获取工程产品的三维点云数据,然后运用逆向工程软件对点云进行处理以及模型三维的设计,最终获得工程产品的全部模型数据。
2、产品更改方案对比
冰箱果菜盒原来的产品如图1所示,该产品的内部底面为一个大平面,无任何其它形状;而客户的最终产品如图2所示,二维图纸如图3所示,底部为十条均匀排列的凸起形状。产品经过升级后,不但看起来更加美观,而且使果菜盒的底部与冰箱内胆之间的摩擦力减小,增加了果菜盒的使用寿命。
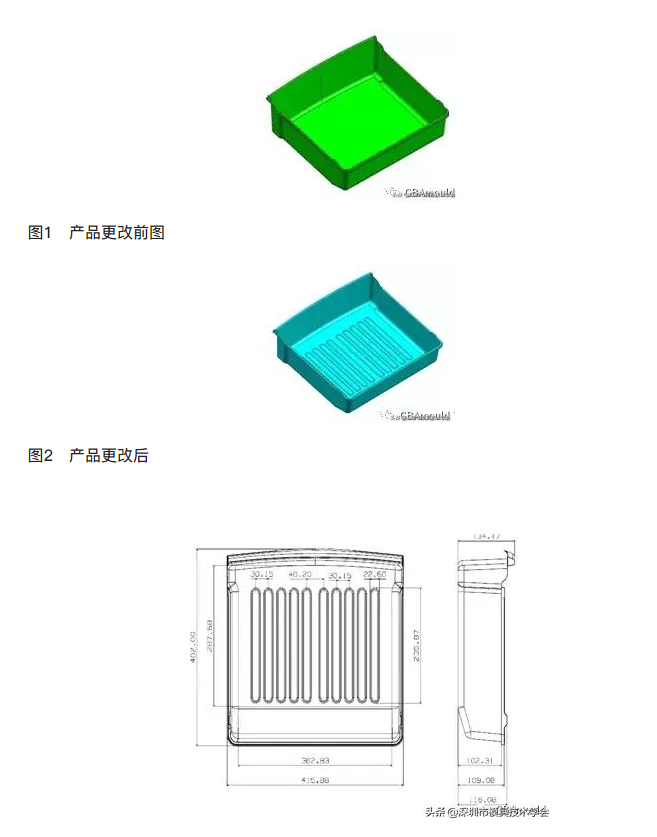
图3 产品更改后2D图纸
3、模具凹模三维扫描
由于此套果菜盒模具是很久以前开发的模具,而且在不同的注塑厂生产时被改动过多次,导致此套模具没有最终的三维图形数据,也无法直接进行数控加工。所以本次修模任务非常艰巨,很难满足客户的交期要求。针对此次模具的特殊情况,采取三维扫描技术和逆向成型技术来完成模具零件的建模。在产品逆向设计过程中,选用Geomagic DesignX和UG软件相互结合来最终完成模具零件的三维数据。
3.1 三维扫描的准备工作。
首先将果菜盒模具的全部零件进行拆解到位,把模具的凹模进行全面的清洗,生锈部位需要抛光处理,确保模具凹模的整体表面质量;然后对模具表面喷洒显像剂,在喷洒显像剂之前一定要摇匀,并把里面的空气排掉,在距离模具表面30厘米左右,对准模具表面进行均匀的喷洒;最后在模具凹模表面粘贴标志点,在粘贴标志点时,为获得理想的点云数据,要求标志点的位置不能有规律性,不能呈直线分布,而且要尽可能贴在工件的平坦区域,不要离每个面的边界处太近。
3.2 三维扫描仪的标定
三维扫描仪一般由高精密工业级立体视觉传感器、激光发生器、三维数据处理系统软件、标定系统、笔记本电脑等组成,三维扫描仪如图4所示。

图5 三维扫描仪标定
在三维扫描仪使用之前,一般要进行标定,标定的好坏直接决定扫描的精度,所以在标定过程中,要严格按照三维扫描仪的标定步骤执行到位。首先打开电脑桌面三维扫描仪软件,利用标定板进行系统的标定,系统需要采集18个位置进行标定。第一次标定时,需要把标定板的大点朝上,如图5所示,设备需要离标定板大约300mm标定1次,接着下降100mm标定第2次,然后提到350mm标定第3次;然后按照标定步骤依次完成其它15个位置的标定。若标定后计算的误差过大,就需要重新进行标定。
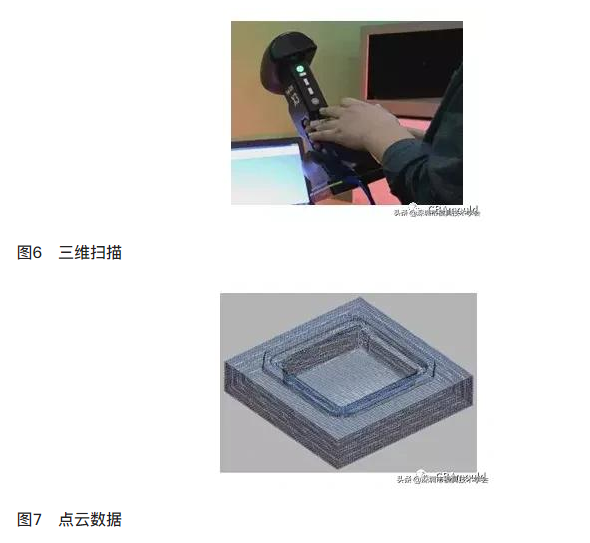
3.3 三维扫描生成点云
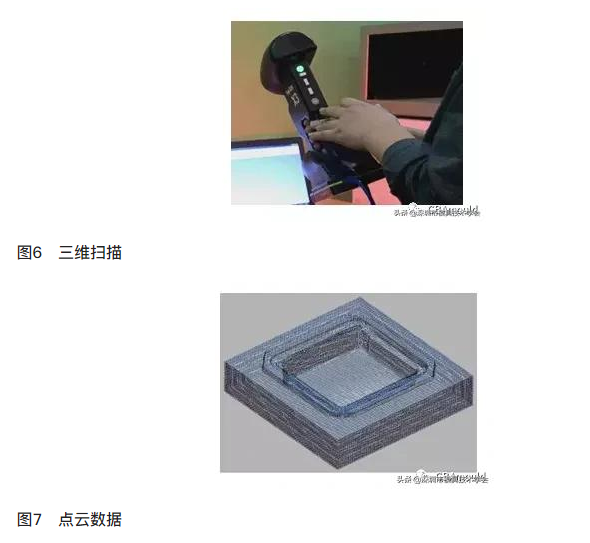
三维扫描时,三维扫描仪距离工件约300mm左右,需要用手按一下设备的扫描健就可以开始扫描了,如图6所示,指示灯显示绿色说明距离正常。在扫描过程中,注意扫描技巧,两个镜头就相当于人的两个眼睛观察物体,防止扫描盲区的出现。每当扫描一个区域完成后需要移动位置继续扫描,直到扫描结果满意为止,扫描完成后,再按一下“扫描健”停止扫描,点云数据如图7所示。然后在扫描软件中旋转观察扫描的点云是否完整,最后进行数据的导出,需要对“扫描健”按两下,导出的过程就是生成三角网格的过程。
4、模具设计与制造
4.1 利用Geomagic软件逆向建模
三维扫描获得的点云数据经常有很多噪音点、杂点,首先要对点云数据进行处理,可在软件中选择“过滤噪音点云”对点云进行处理,也可以根据需要选择“用包围盒过滤”或“用扫描范围过滤”过滤离群领域;然后点击“采样”菜单可对点云数据按照“统一比率”或“统一距离”进行选择,在选项中可对“单元点云间的平均距离”、“采样比例”进行相应的设置;在“详细设置”里面可以根据需要选择是否选择“保持边界”。点云优化完成后就进行建模环节了。
首先在在软件中把点云数据对齐到坐标系中,分别在模具凹模点云的两侧面建立参考平面,然后通过手动对齐分别与软件的上平和及右平面对齐。然后考虑模具凹模形状中平面较多,在“领域”选项卡中选择“自动分割”菜单,软件根据扫描数据的曲率和特征自动将面片归类于不同的领域。最后根据不同领域的面片,采用曲面拟合、放样向导等工具,配合正向命令拉伸、旋转、放样、扫描等工具进行三维图形的设计,设计完成后如图8所示。逆向设计完成后,根据客户的产品需求,在逆向设计完成的三维图形基础上进行创新设计,最终完成模具凹模的全部三维图形的设计,如图9所示。
4.2模具凹模数控编程加工
由于此模具凹模逆向完成后比原来的模型长出了十条均匀排列的凸起形状,一般有两种模具修模方案:一种是模具凹模整体预热后烧焊,然后再进行数控加工,此种方案由于修模时只加工烧焊部分,模具的修模工期较短,但烧焊对模具的使用寿命影响较大;另外一种方案是把模具凹模型腔形状整体降低,该种方案需要对模具凹模所有形状重新加工,不但要进行数控编程与加工、电火花放电加工、还需要整体抛光处理,所以加工周期和修模成本较高,但模具的使用寿命较好。
对于此次模具整改方案,考虑到客户的需求,急需进行产品的升级换代,采取整体预热底部烧焊的方式进行整改,烧焊完成后需要进行模具凹模的数控编程与加工。数控加工工艺按照粗加工、半精加工、精加工的思路来进行数控编程;加工刀具采用以下型号:D21R0.8飞刀、B16R8球头铣刀、B8R4球头铣刀,其中D21R0.8飞刀主要用于粗加工,B16R8球头铣刀用于型腔面的半精加工及精加工,B8R4球头铣刀主要用于型腔面的清角加工。
5、结语
该研究以冰箱果菜盒模具为例,详细阐述了产品更新换代进行模具修模全流程的整改方案,该研究中应用了目前行业内先进的三维扫描技术、逆向建模技术、数控编程与加工技术,该方案的研究为注塑模具厂进行模具修模提供了宝贵的经验,值得借鉴和参考。